
I’m running (jogging?) downtown two or three times a week. And I’m an OpenStretMap contributor. And I own a RTK rover. You see where I’m going here.
Some years ago I was running always in the same woods, but not necessarily along the same paths or tracks. These woods were badly mapped on OpenStreetMap, so to draw the missing ways, I have exported in GPX output my activities (few dozens) from my fitness tracking software. Next I used a script to aggregate and smooth all the GPX files, it gave me a kind of Strava™ heatmap, but offline. All I had to do was to draw over the lines in Id.
Since, I made myself a RTK rover that I am using on the Centipede network. It works very well when I am on foot, but does it work well when I’m running at 8 or 10 km/h ?
First of all, you need a fairly high sampling rate. Fortunately, I’d programmed the FP9 for 5 Hz, which is probably not far from the maximum that the Bluetooth connection can support (besides, using Bluetooth headphones at the same time as the rover is out of the question, the sound is like being chopped up).
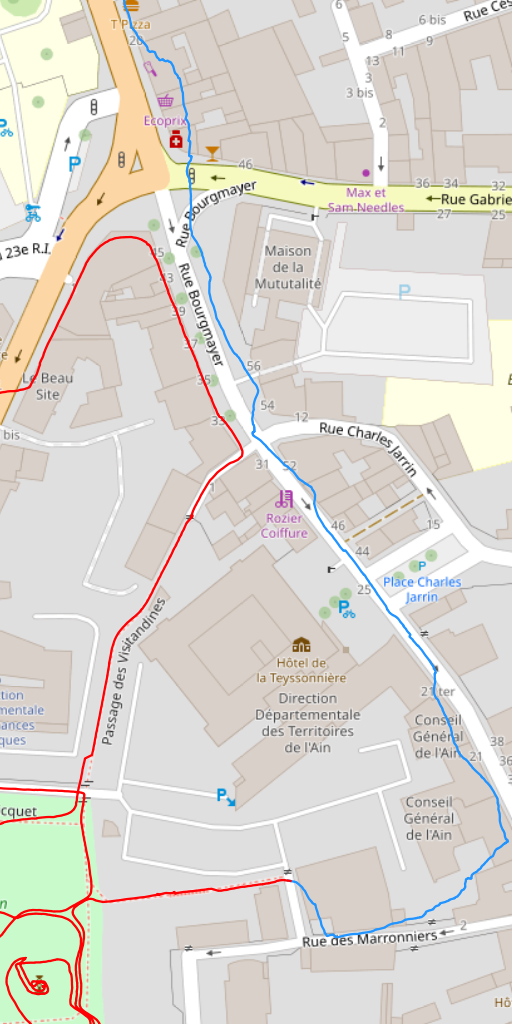
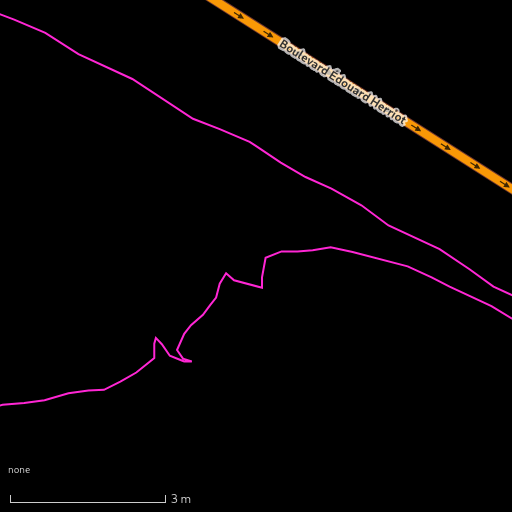
Difference in precision with the rover in the pocket (blue) or in the hand (red)
Next, do you have to hold the rover in your hand or is it enough to be in your pocket?
When I need to be very precise I hold it over my head, but that’s not practical when you’re trying to run. So I tried leaving it in the pocket of my shorts or trousers (blue line), and hold it in my hand (red line) in the same way as you would hold an object when running.
The image above speaks for itself — keep it in your hand!

So here I am, running and recording my route (we’re in Bourg-en-Bresse today).
I’m using Bluetooth GNSS to supply my smartphone with positioning data instead of internal geolocation mechanisms.
I’ve got three options to get the track:
- export from my fitness tracking software,
- extract the route from the GPX recorded by GPSLogger which continuously records the position 24 hours a day in the background,
- or the simplest way (that I choose), starting a recording with OsmAnd which will only contain what I want to record. Then I send the file to my computer thru KDE Connect.
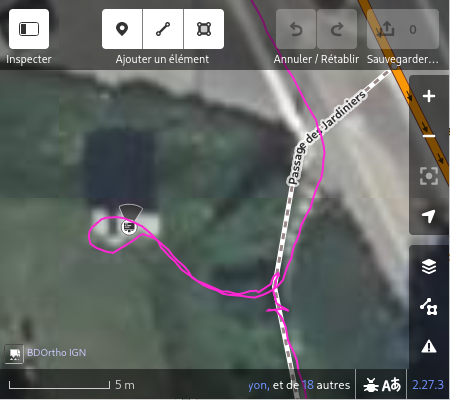
Zig-zag at the exact location of a barrier
My kink is micro-mapping, but not only that. And there are often no footpaths in public parks and gardens, some of the routes are rough, there are no steps, no obstacles, etc.
To point out things that might be missing or misplaced, I make a zig-zag with my arm at the precise location of what I want to map, slowing down a little, and I make a mental note of the thing.
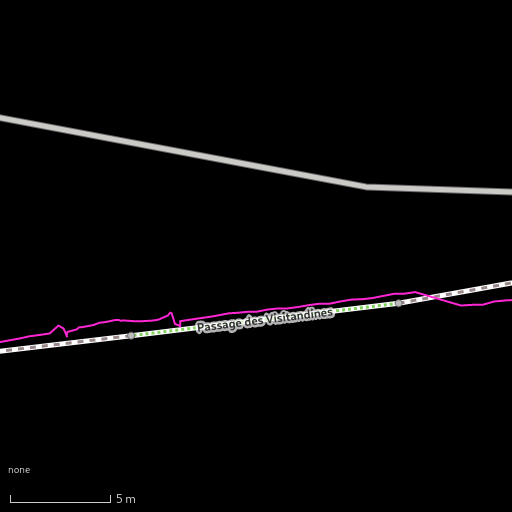
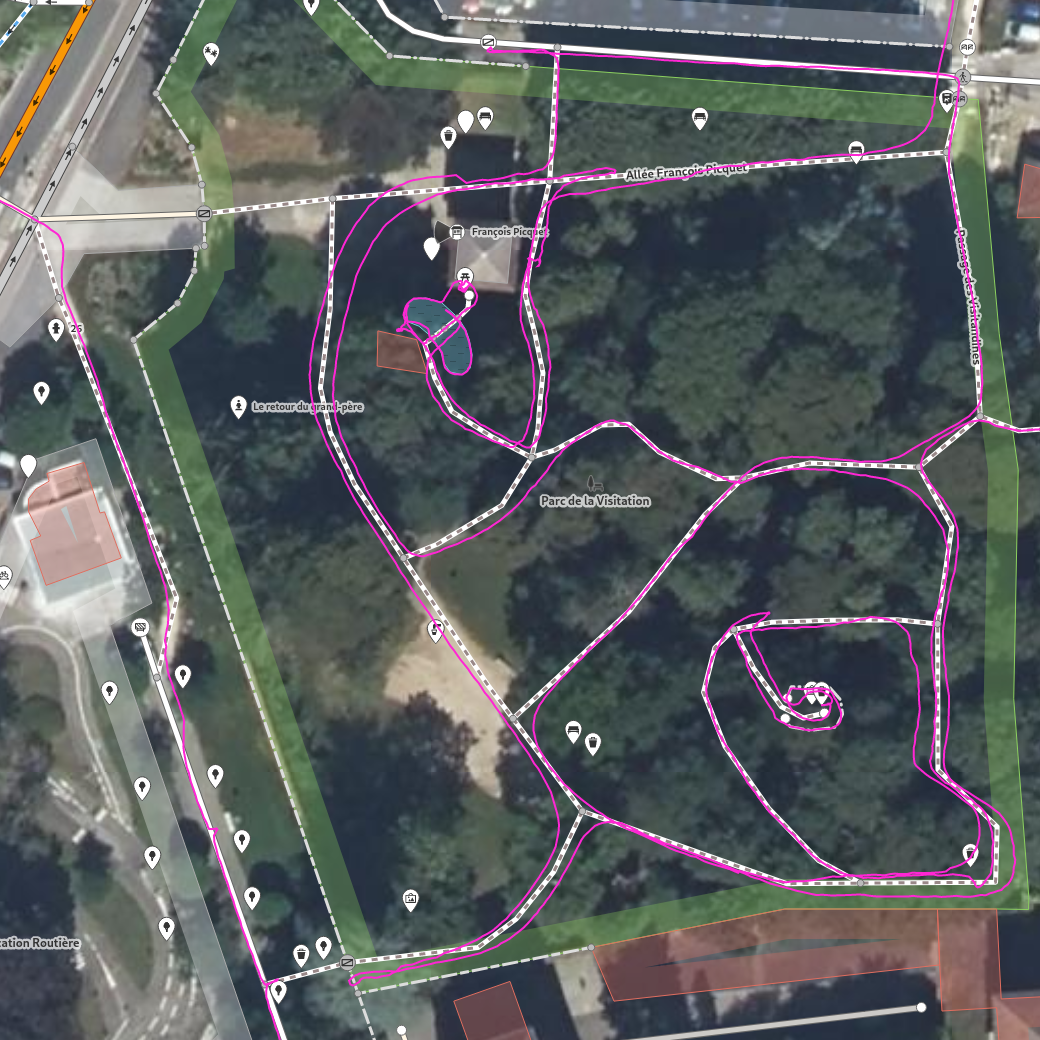
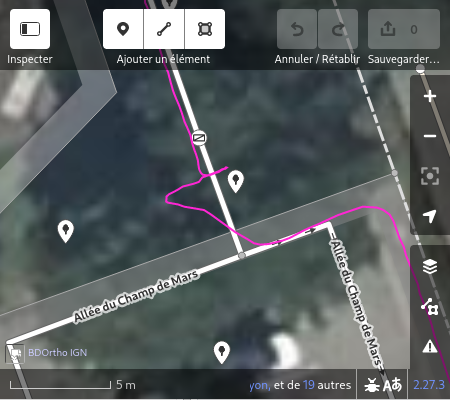
Parc de la Visitation, data from OSM, IGN and own GPX file
In purple is the GPX route in the Parc de la Visitation, which I used to draw the missing paths.
In the top left-hand corner I passed through the middle of the pedestrian crossing, which tells me that the IGN base map and the OSM map are well aligned. Incidentally, it’s a habit I’ve got into: always take the middle of pedestrian crossings to cross a street at right angles. If I cross a street diagonally, it’s because there’s no pedestrian crossing there.
In the bottom left-hand corner I made a small dent for the location of a bench (which I forgot to map on OSM).
At the top centre I stopped at a gate (open) to remind myself to put it on OSM.
Just below I passed the rover on the edge of a kidney-shaped pool, excellent precision even though the place is a bit sunken and I didn’t stop running.
In the bottom right-hand corner I passed the rover over the fence at the top of the small mound, still running (#micromapping).
In conclusion, it works very well and makes you want to vary the routes when running to map new things.