
Je cours en ville plusieurs fois par semaine. Et je contribue un peu à OpenStreetMap. Et j’ai un rover RTK. Vous voyez venir le projet ?
Il y a quelques années je courais toujours dans le même bois, mais pas forcément par les mêmes sentiers ou chemins. Ce bois était mal cartographié sur OpenStreetMap, alors pour dessiner les voies manquantes, j’avais exporté en GPX mes dizaines d’activités le concernant depuis mon logiciel de suivi sportif. Ensuite j’avais utilisé un script pour aggréger et lisser tous les fichiers GPX, ça m’avait donné une sorte de heatmap Strava™ mais complètement offline. J’avais juste eu à repasser les tracés dans Id.
Depuis je me suis fabriqué un rover RTK que j’utilise sur le réseau Centipede. Il fonctionne très bien à pied. Mais en courant entre 8 et 10 km/h ?
Déjà, il faut une fréquence d’échantillonnage assez élevée. Ça tombe bien, j’avais programmé le FP9 pour 5 Hz, ce qui est probablement pas loin du maximum que la connexion Bluetooth peut supporter (d’ailleurs il est hors de question d’utiliser des écouteurs Bluetooth en même temps que le rover, le son est comme passé au hachoir).
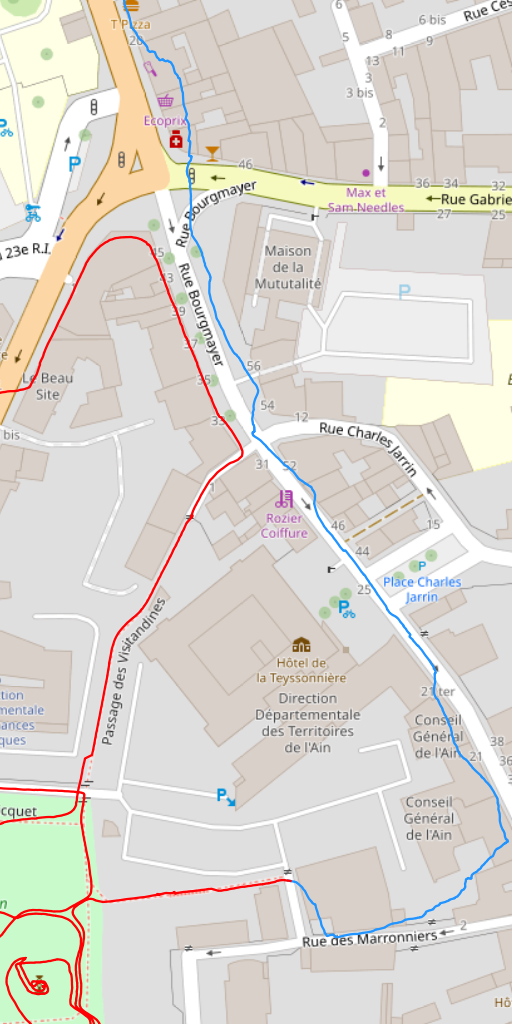
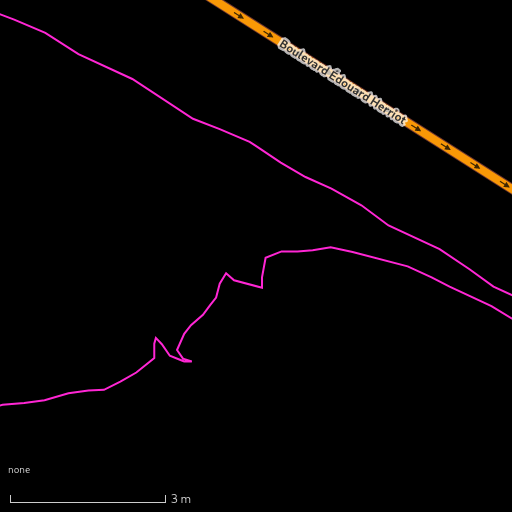
Différence de précision avec le rover dans la poche (bleu) ou à la main (rouge)
Ensuite, faut-il tenir le rover à la main ou est-ce que c’est suffisant qu’il soit dans la poche ?
Quand j’ai besoin d’une grande précision je le tiens au dessus de ma tête, mais là on va courir, ce n’est pas très pratiquable. Alors j’ai testé de le laisser dans la poche du short ou pantalon donc collé contre mon corps (trace bleue) et tenu à la main donc écarté du tronc comme quand on tient un objet normalement en courant, une partie des satellites étant donc cachés par mon corps (trace rouge).
L’image au dessus parle d’elle-même il faut le garder à la main !

Me voilà donc en train de courir et d’enregistrer mon trajet (on est à Bourg-en-Bresse aujourd’hui).
Je me sers de Bluetooth GNSS pour alimenter mon smartphone en données de positionnement en lieu et place des mécanismes de géolocalisation internes.
J’ai trois options pour récupérer le tracé:
- export du GPX depuis le logiciel de suivi sportif,
- extraction du parcours depuis le GPX que GPSLogger enregistre en continu et en tâche de fond 24h/24,
- ou le plus simple (que j’ai choisi), démarrer un enregistrement avec OsmAnd qui ne contiendra que ce que je veux enregistrer. Je l’envoie ensuite sur mon ordinateur avec KDE Connect.
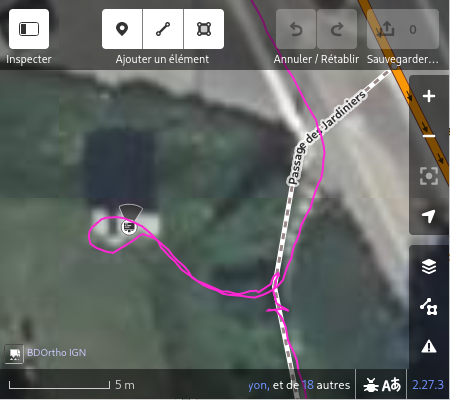
Zig-zag à l’emplacement exact d’une barrière
Mon kink, c’est le micro-mapping, mais pas que. Et il manque souvent des chemins piétons dans les parcs et jardins publics, certains tracés sont approximatifs, il manque des escaliers, des obstacles, etc.
Pour m’indiquer à moi-même des trucs potentiellement manquants ou mal placés, je fais un zig-zag avec mon bras à l’emplacement précis de ce que je veux signaler en ralentissant un peu la course, et je note mentalement le truc.
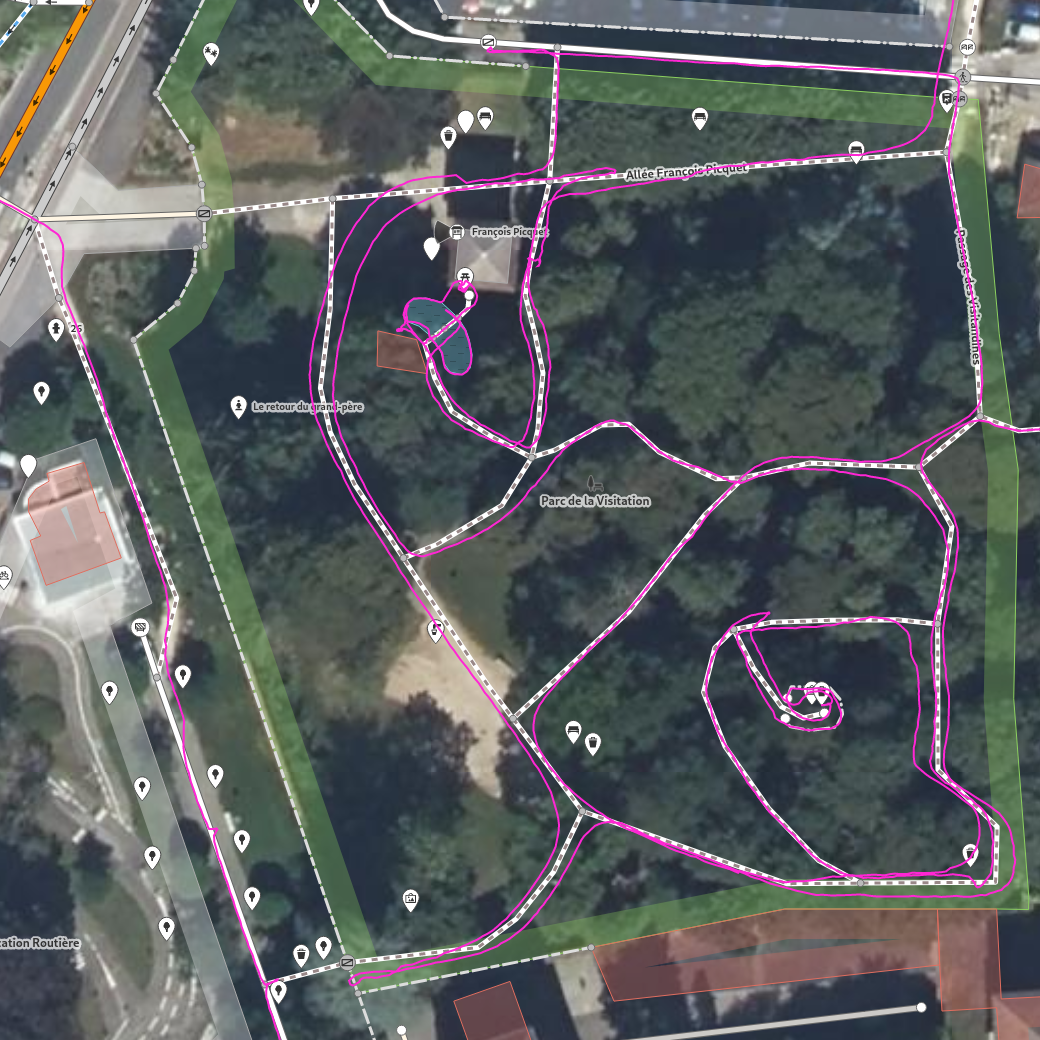
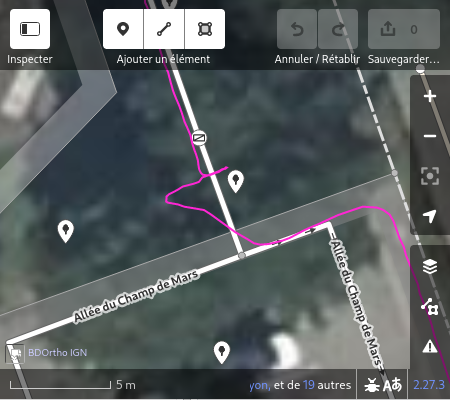
Le parc de la Visitation, données OSM, IGN et GPX personnel
En violet le tracé GPX dans le parc de la Visitation, qui m’a servi pour dessiner les chemins manquants.
En haut à gauche je suis passé au milieu du passage piéton, j’en conclus que le fond de carte IGN et la carte OSM sont bien calés. D’ailleurs c’est une habitude que j’ai prise: toujours prendre le milieu des passages piétons pour traverser une rue à angle droit. Si je traverse une rue en diagonale c’est qu’il n’y a pas de passage piéton à cet endroit.
En bas à gauche j’ai fait un petit écart pour l’emplacement d’un banc (que j’ai oublié de reporter sur OSM).
En haut au milieu je me suis arrêté à la hauteur d’un portail (ouvert) pour me rappeler de le mettre sur OSM.
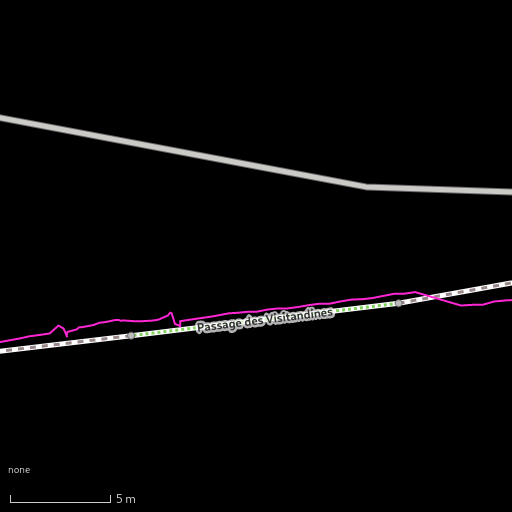
Juste en dessous j’ai passé le rover sur le bord d’un bassin en forme de haricot, excellente précision alors que le lieu est un peu enfoncé et je ne me suis pas arrêté de courir.
En bas à droite j’ai passé le rover au dessus de la barrière au sommet du petit monticule, toujours en courant (#micromapping).
En conclusion, ça fonctionne très bien et ça donne envie de varier les parcours pour mapper de nouvelles choses.