Test des données LIDAR HD de l’IGN avec CloudCompare pour faire de l’archéologie. Disclaimer: je n’y connais rien dans ces domaines !
ATTENTION: La technique qui suit est en grande partie rendue obsolète parce que l’IGN fournit maintenant les nuages de points déjà classés, les opérations longues et peu précises qui consistent à «deviner» le sol ne servent plus à rien. Avec les LAStools on peut même facilement extraire la classe qui nous intéresse (la 2 généralement) avant d’importer les .las/.laz dans CloudCompare ce qui allège encore le processus.
Il y a quelques temps je suis allé avec un ami sur plusieurs sites du Valromey pour faire des photos de vestiges de châteaux et de mottes castrales. Quand on parle de vestiges c’est pire que des ruines, on devine à peine qu’il y a eu une construction humaine à ces endroits, et pour certaines il m’a fallu avoir le nez dans les éboulis pour constater que en effet le truc n’était pas naturel ! Évidemment c’est généralement en plein bois, et pas la peine de préciser que les photos ne rendaient rien du tout.
L’IGN ayant publié une partie des données de sa campagne LIDAR HD j’étais curieux de savoir à quoi ce genre d’endroit pouvait ressembler dans un nuage de point. On va donc manipuler des fichiers LAS (ou LAZ, la version zippée). Pour le Valromey les données publiées ne sont pas classifiées donc j’imagine que ça veut dire qu’elles sont brutes mais ça ne doit pas être génant, moi ce que je veux c’est supprimer la végétation, mais tout d’abord il faut trouver un soft pour lire ces fichiers…
À priori QGIS sait le faire mais j’ai pas trop compris comment, alors j’ai jeté mon dévolu sur CloudCompare qui est opensource & libre et qui contient plein de plugins pour des traitements divers et variés.
Un semis LIDAR HD complet
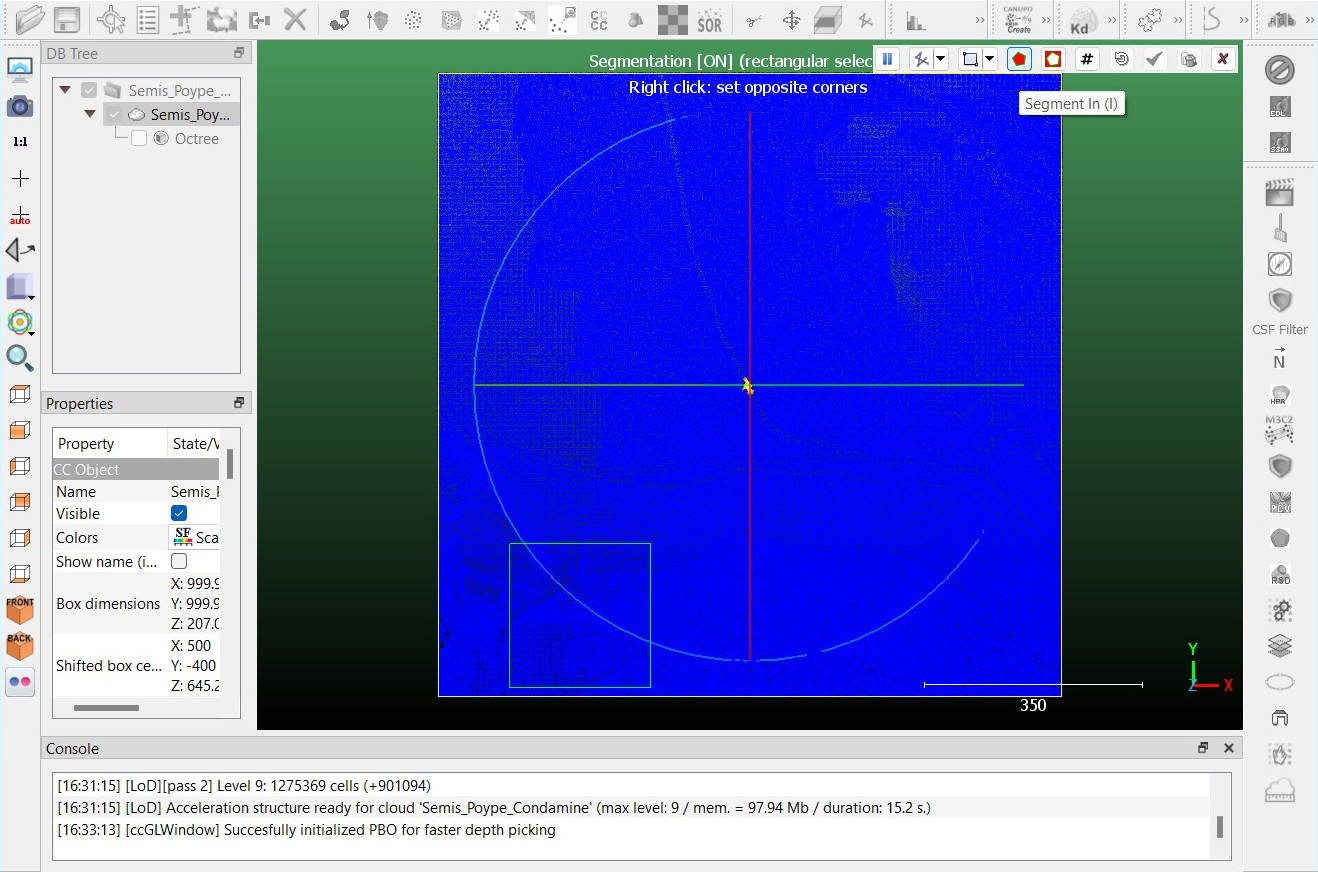
Quand on télécharge le zip de la zone qui nous intéresse sur le site de LIDAR HD, on se retrouve avec 4 fichiers las/laz qui correspondent aux 4 tuiles de la zone, donc comme avant de les charger je ne sais pas laquelle correspond à quel coin je les ouvre toutes en même temps et elles s’assemblent parfaitement. Ensuite avec l’outil ciseau je fais un rectangle autour de la surface qui m’intéresse vraiment et je ne garde qu’elle, parce que traiter quelques dizaines de millions de points prend un temps fou avec mon petit laptop, autant réduire dès le départ le nombre de points à computer !
Un crop de semis LIDAR HD
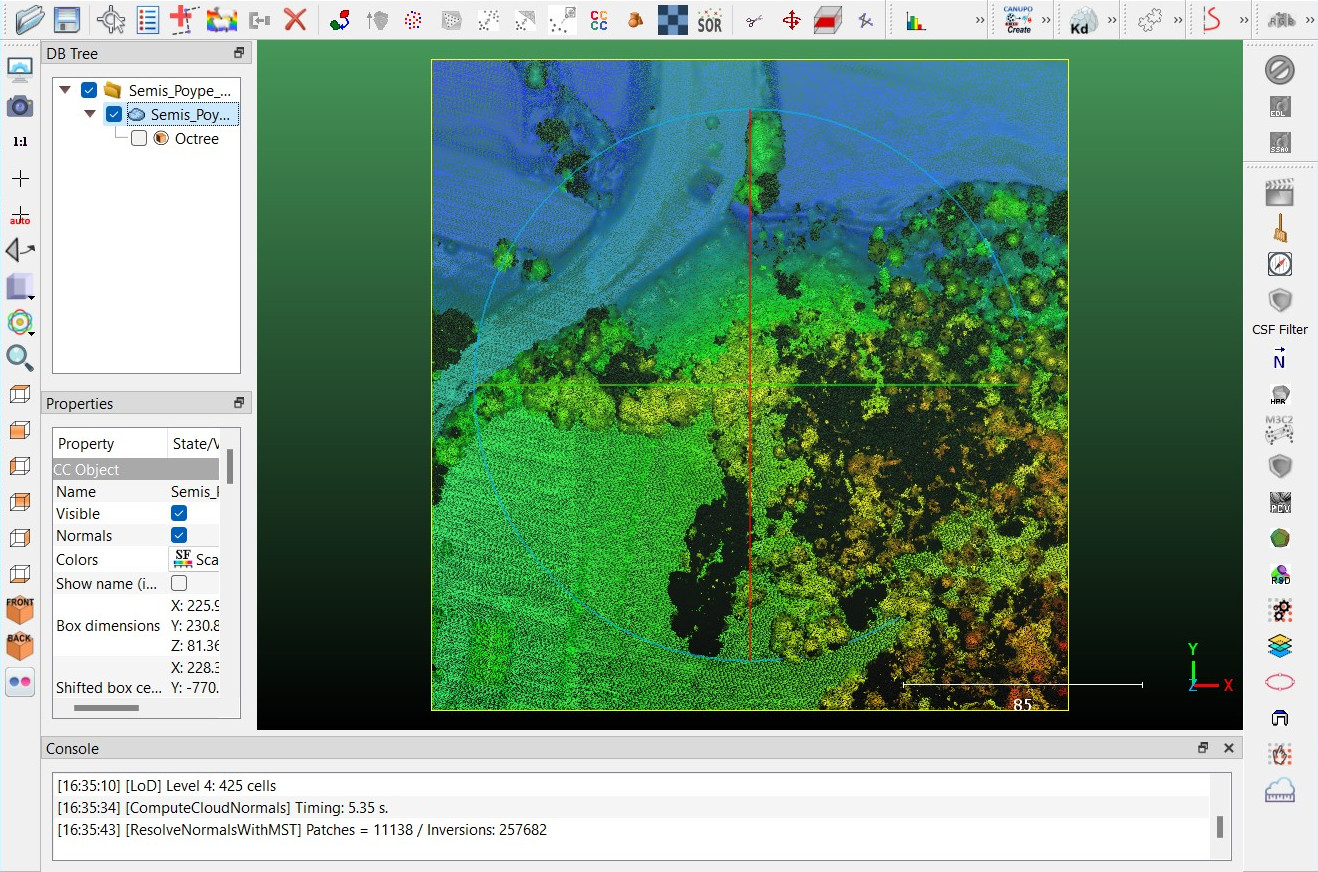
Ensuite après passage sur les forums et tatonnements, un calcul des normales, puis «export coordinate(s) to SF(s)» et je me retrouve avec des jolies couleurs (par défaut elles varient selon l’altitude des points, enfin je crois). Si on tourne un peu l’image ça fait de la 3D c’est beau !
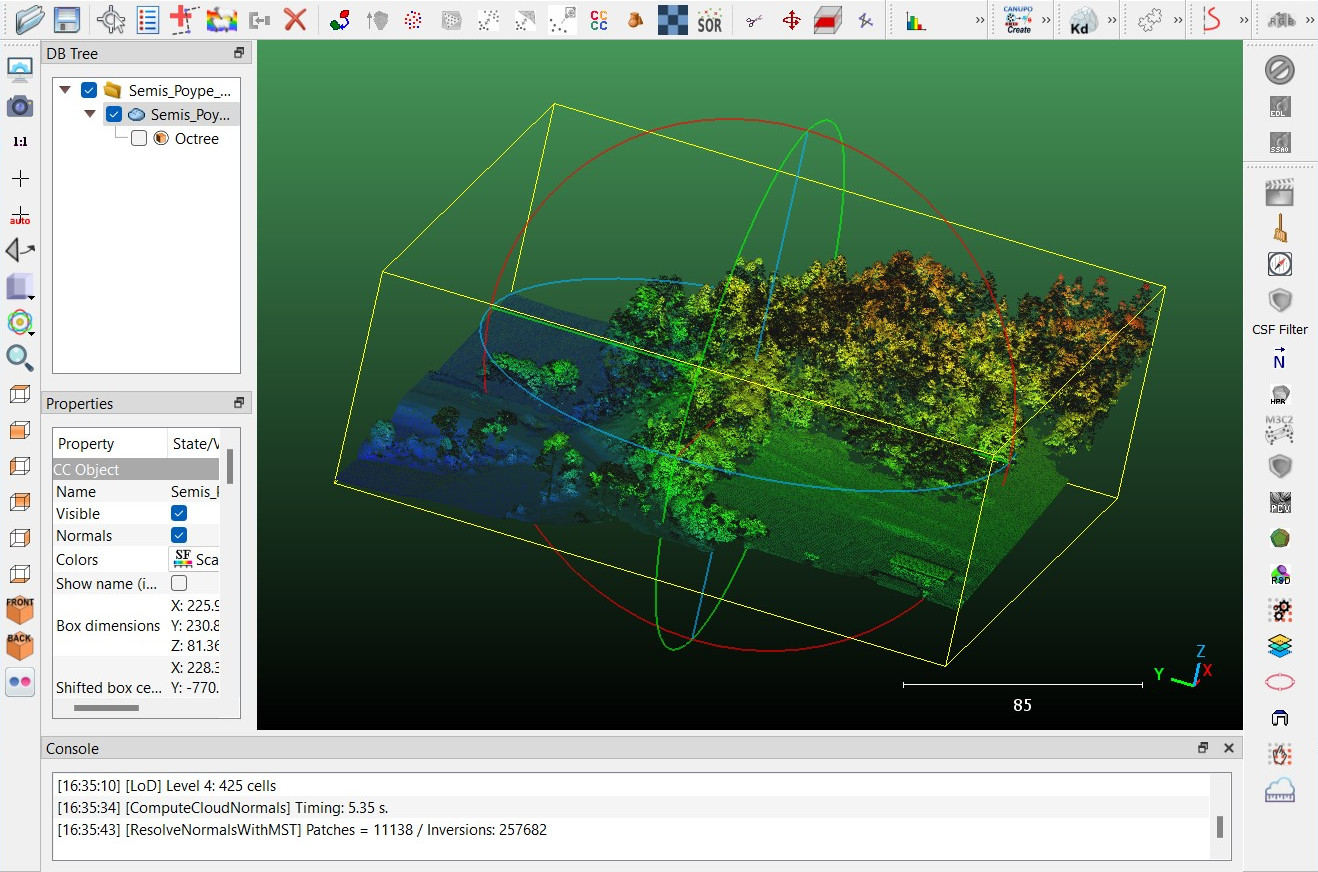
Un peu de couleur
Étape suivante, enlever les arbres. Si j’ai bien compris le module LIDAR enregistre plusieurs caractéristiques pour chaque retour de rayon laser émis: géopositionnement, intensité de retour, et probablement d’autres trucs liés à la longueur d’onde et à la diffusion/dispersion (?). Ce qui m’intéresse ce sont les rayons qui ont réussi à atteindre le sol en passant à travers la couverture végétale, il n’en reste probablement pas beaucoup au m². D’après l’Internet, un des plugins efficaces pour sortir tous les points qui ont fait le chemin maxi est «CSF Filter». Ce filtre a deux onglets de configuration, dans le premier je reste sur «relief» parce que j’imagine que c’est ce dont son alogorithme doit s’occuper, et dans le deuxième onglet le paramètre intéressant parait être «Cloth resolution» et c’est avec celui-là que je tatonne, et la valeur retenue est 0.2.
Le plugin CSF Filter Ground points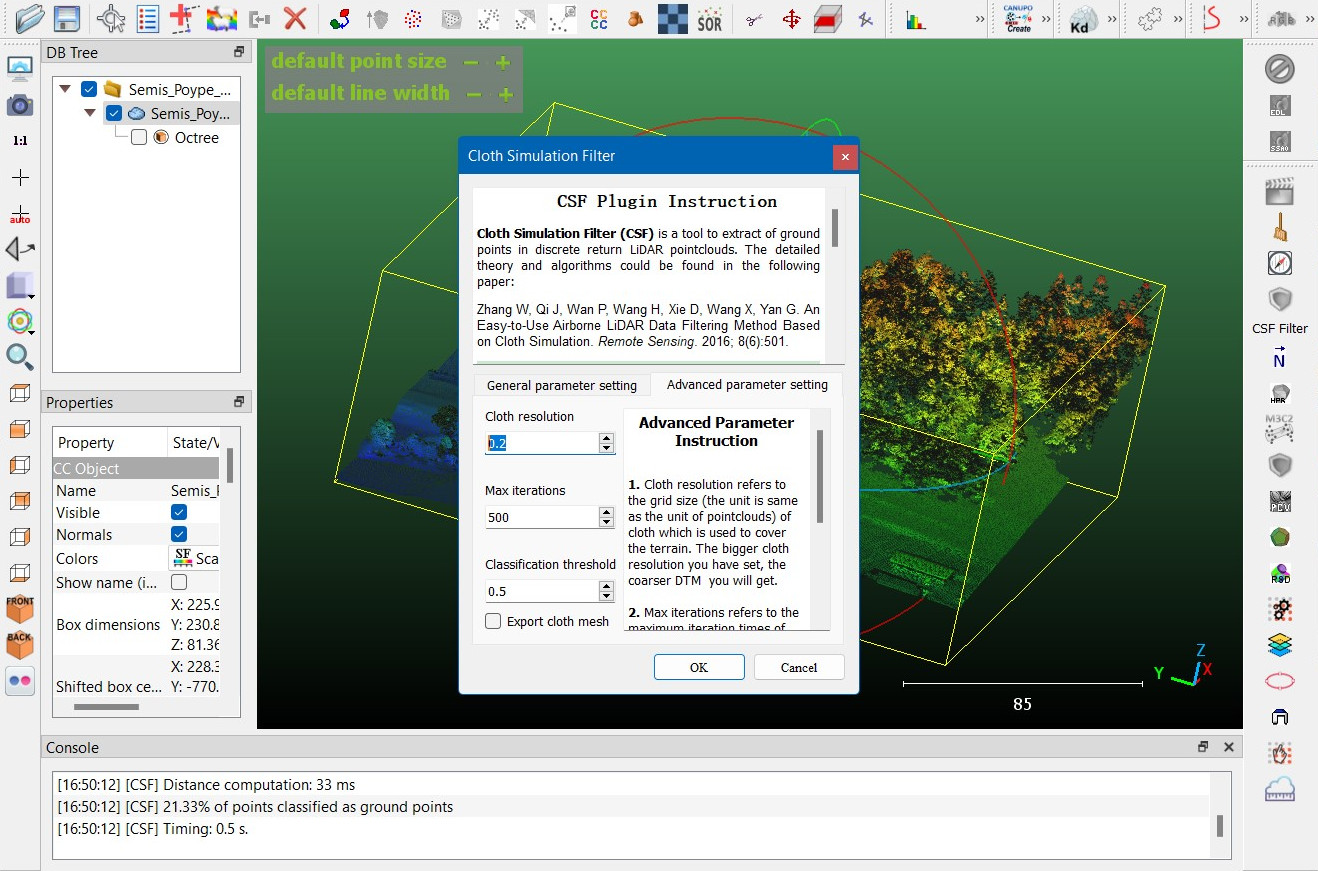
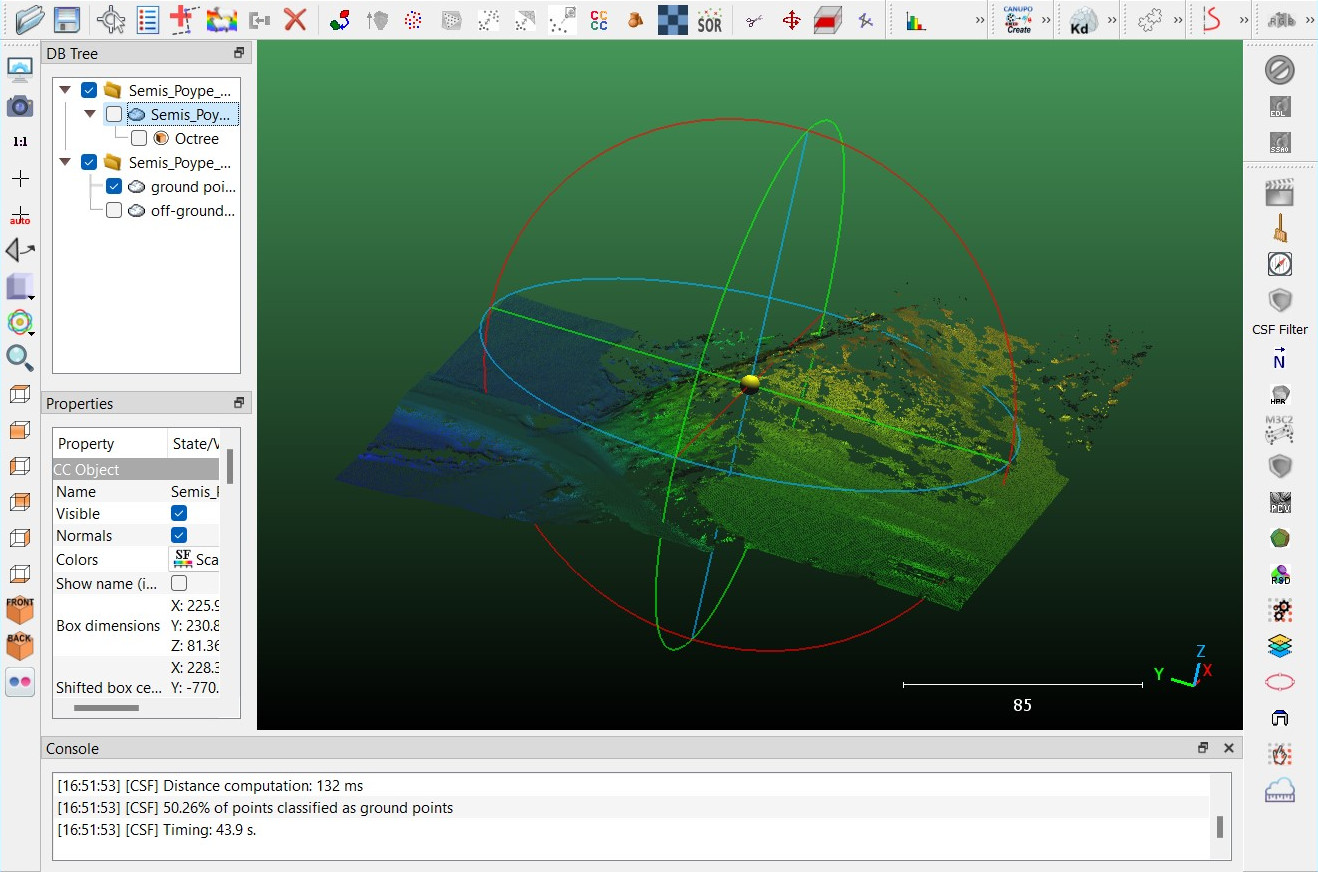
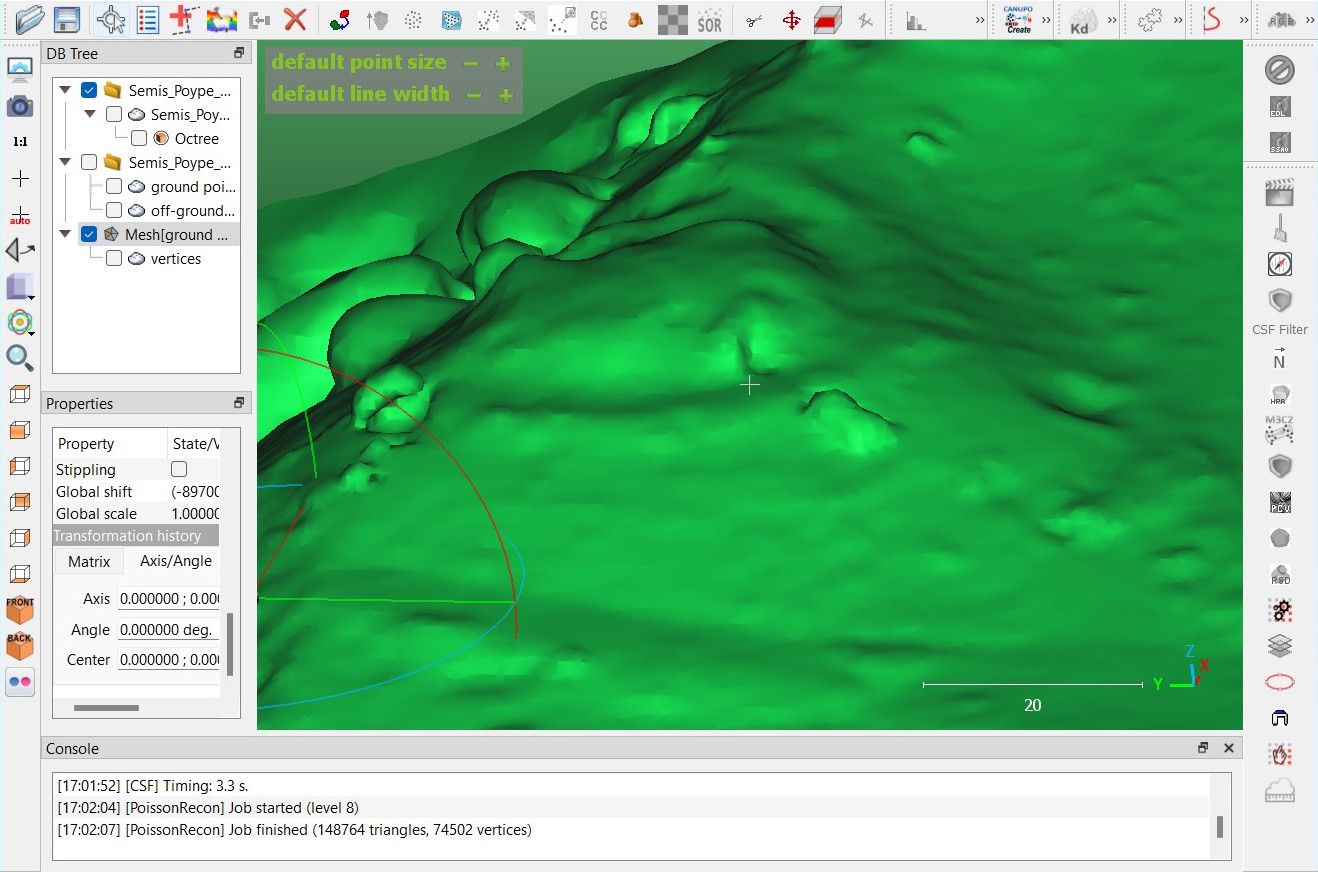
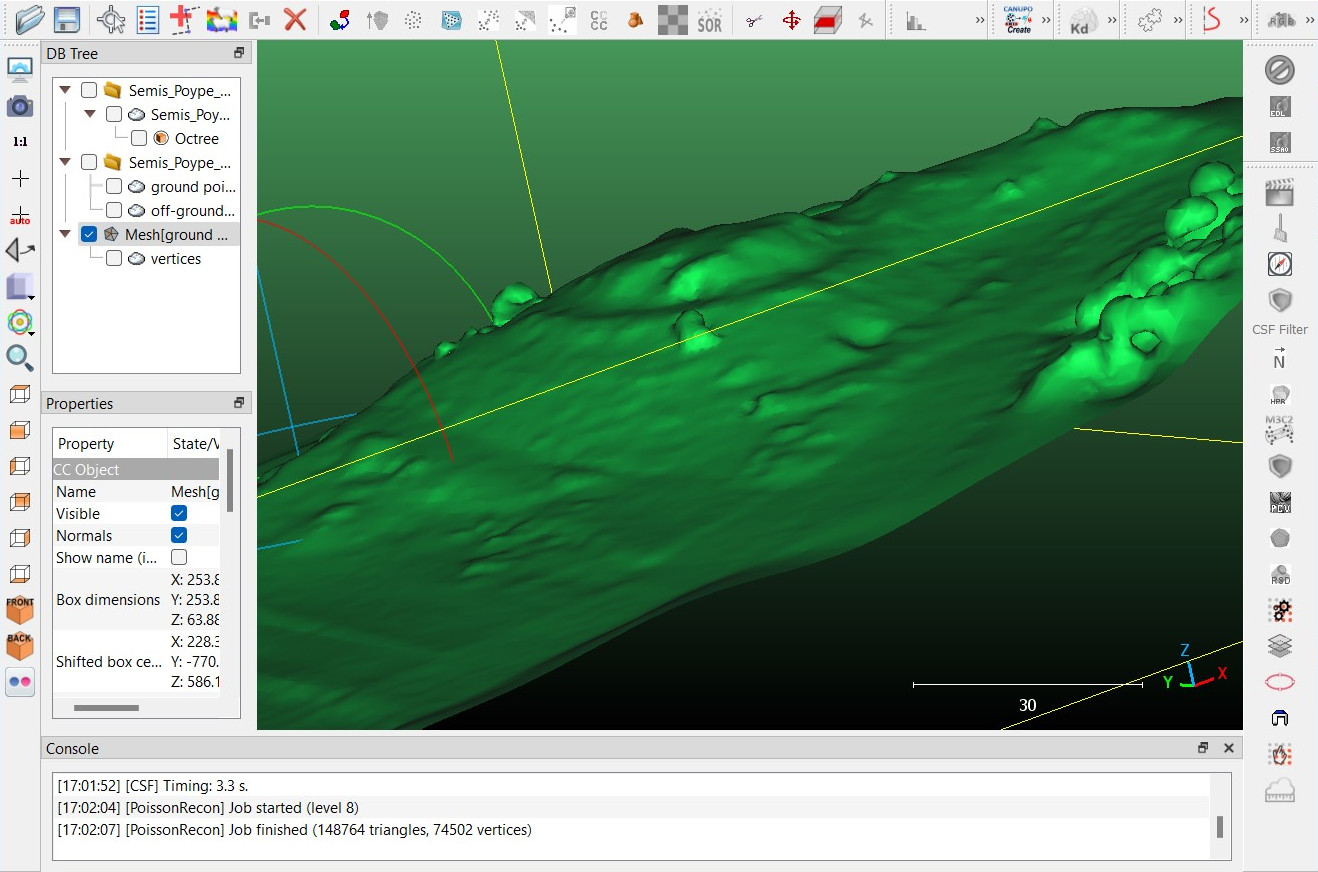
Voilà, je me retrouve avec un sous-nuage de points qui paraissent bien représenter la surface du sol. Un autre plugin va améliorer la visualisation de tout ça en transformant les points en surface, c’est «PoissonRecon», que j’applique sur la branche «ground points» et, tadam: on voit bien les deux plateformes de la poype ! Pour faire mieux il faudrait que je nettoie manuellement les points qui sont restés dans les arbres de façon évidente, encore un truc à apprendre !
Le résultat Vue de détail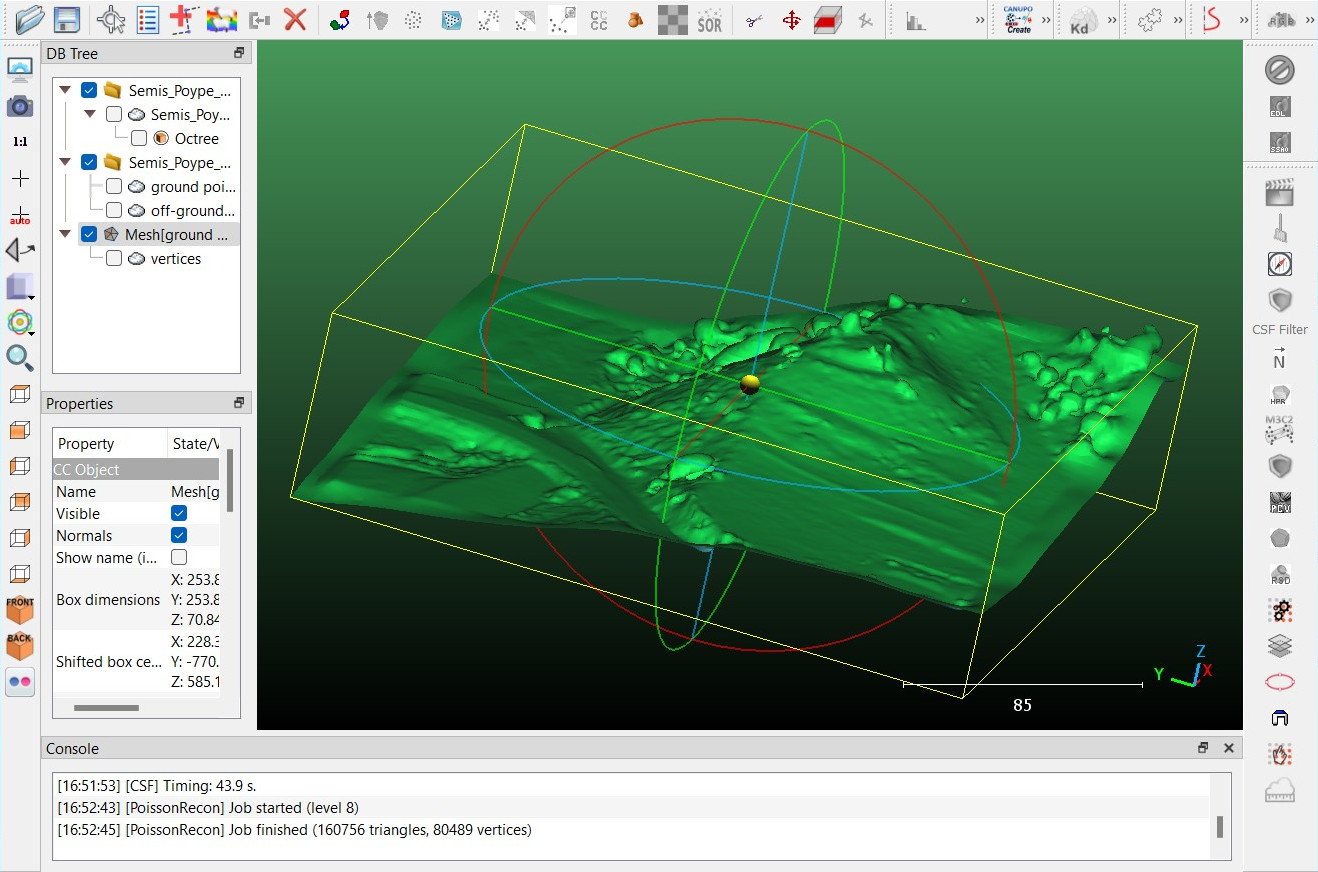
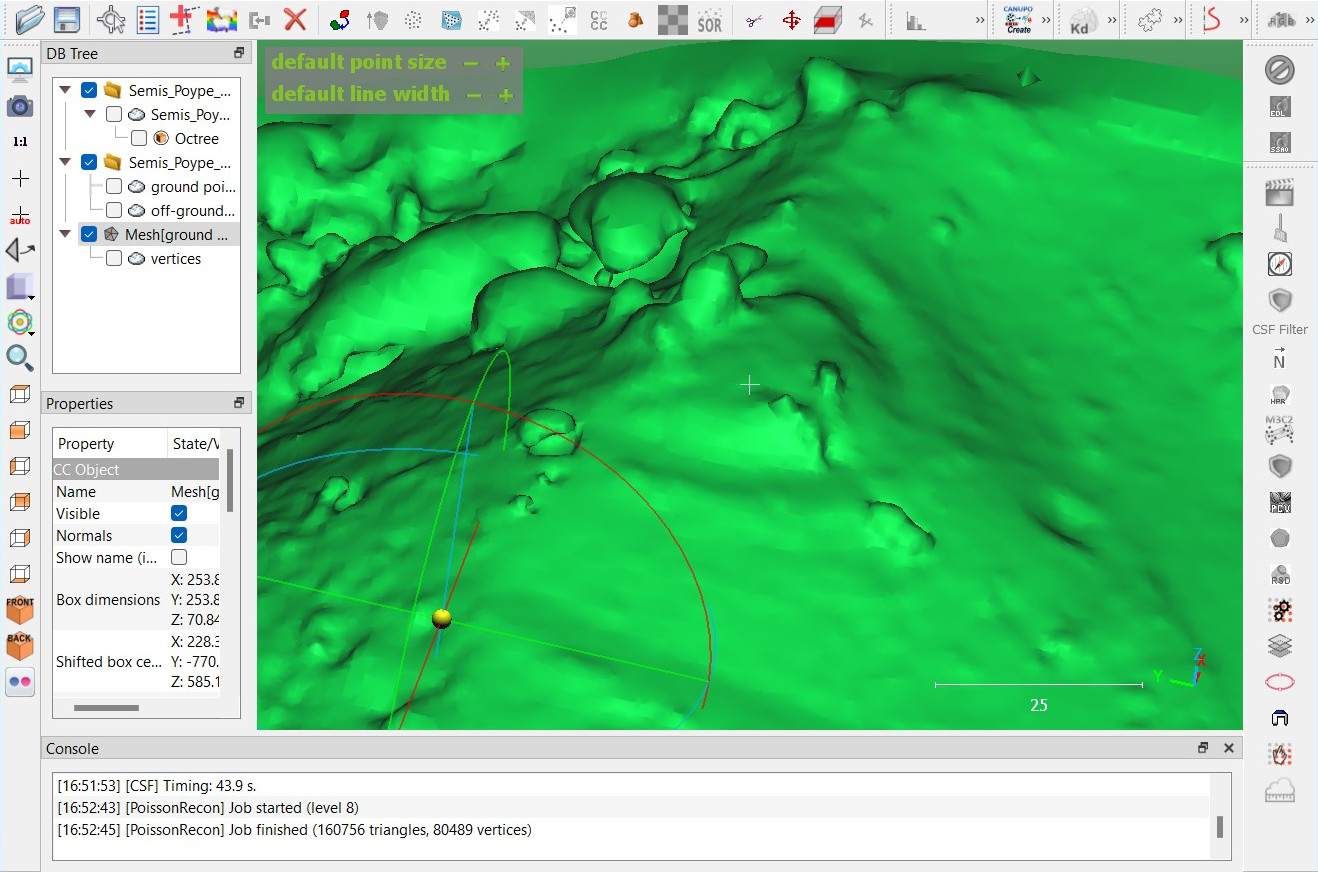
Avec 0.4 comme valeur de «Cloth resolution» c’est un peu mieux.
La poype sur la crête